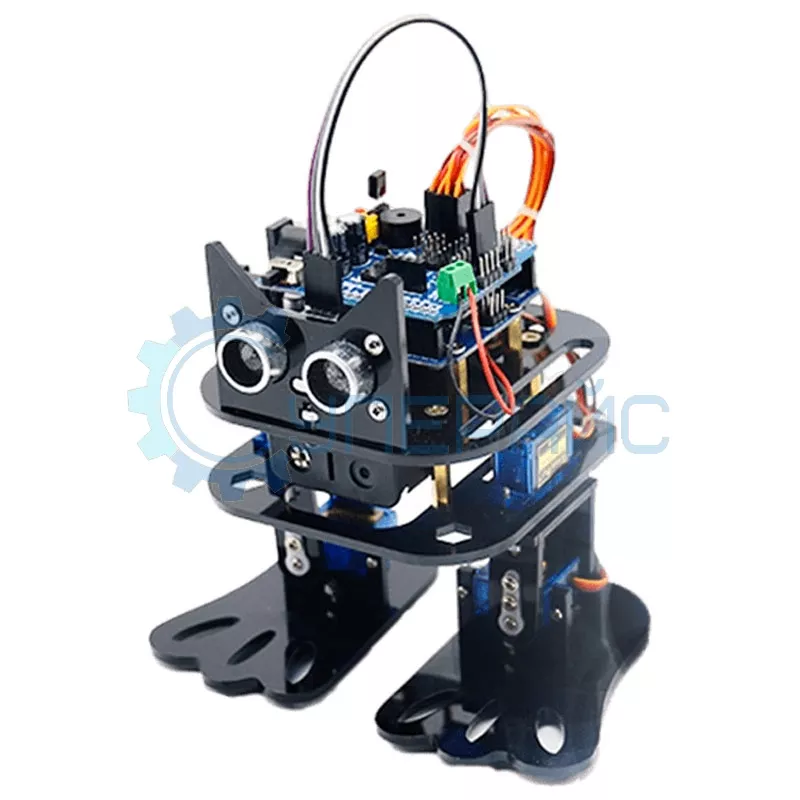
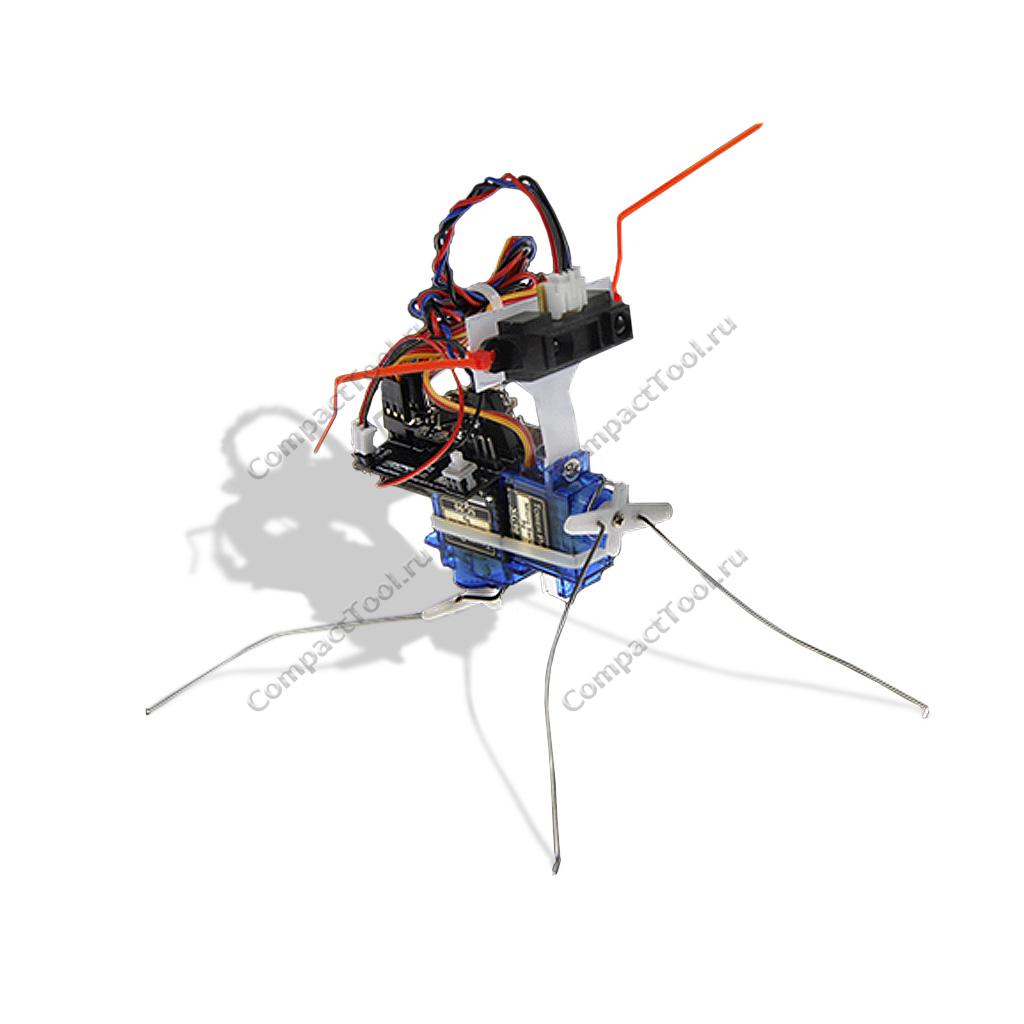
Простой шагающий робот на Ардуино
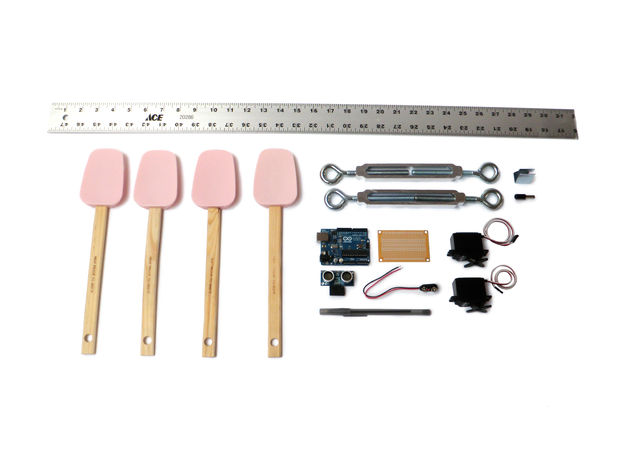
Купили 21 человек. Во второй книге курса «Основы микропроцессорной техники» подробно рассмотрены вопросы разработки шагающих роботов на базе Arduino. Если в первой книге основное внимание уделялось программированию «с нуля», основам пайки, работе датчиков и т. Прочитав книгу, вы научитесь выполнять анализ простейших электромеханических систем, таких как манипуляторы, конечности шагающих роботов, научитесь делать их математическое описание и переводить в программный код.














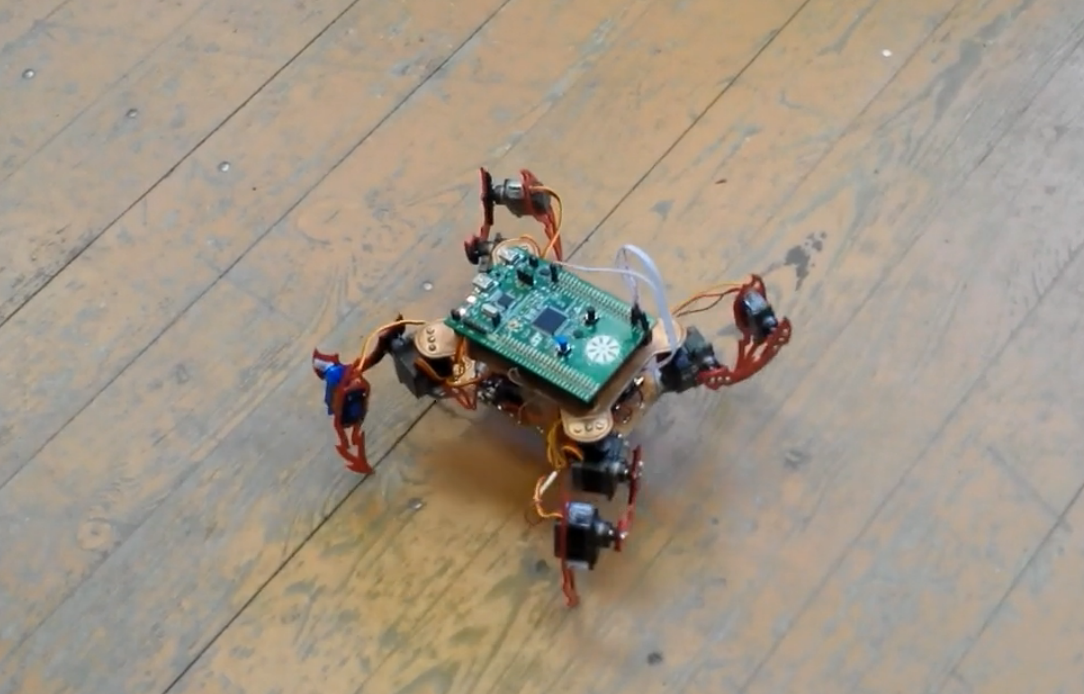
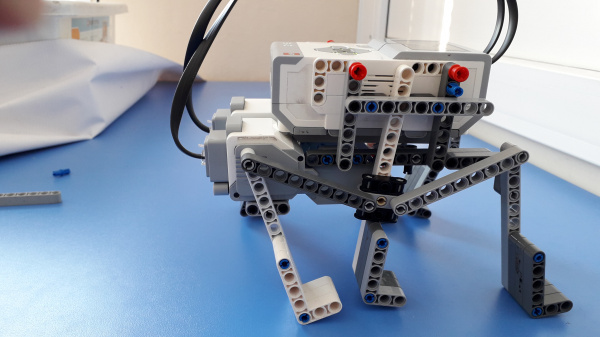
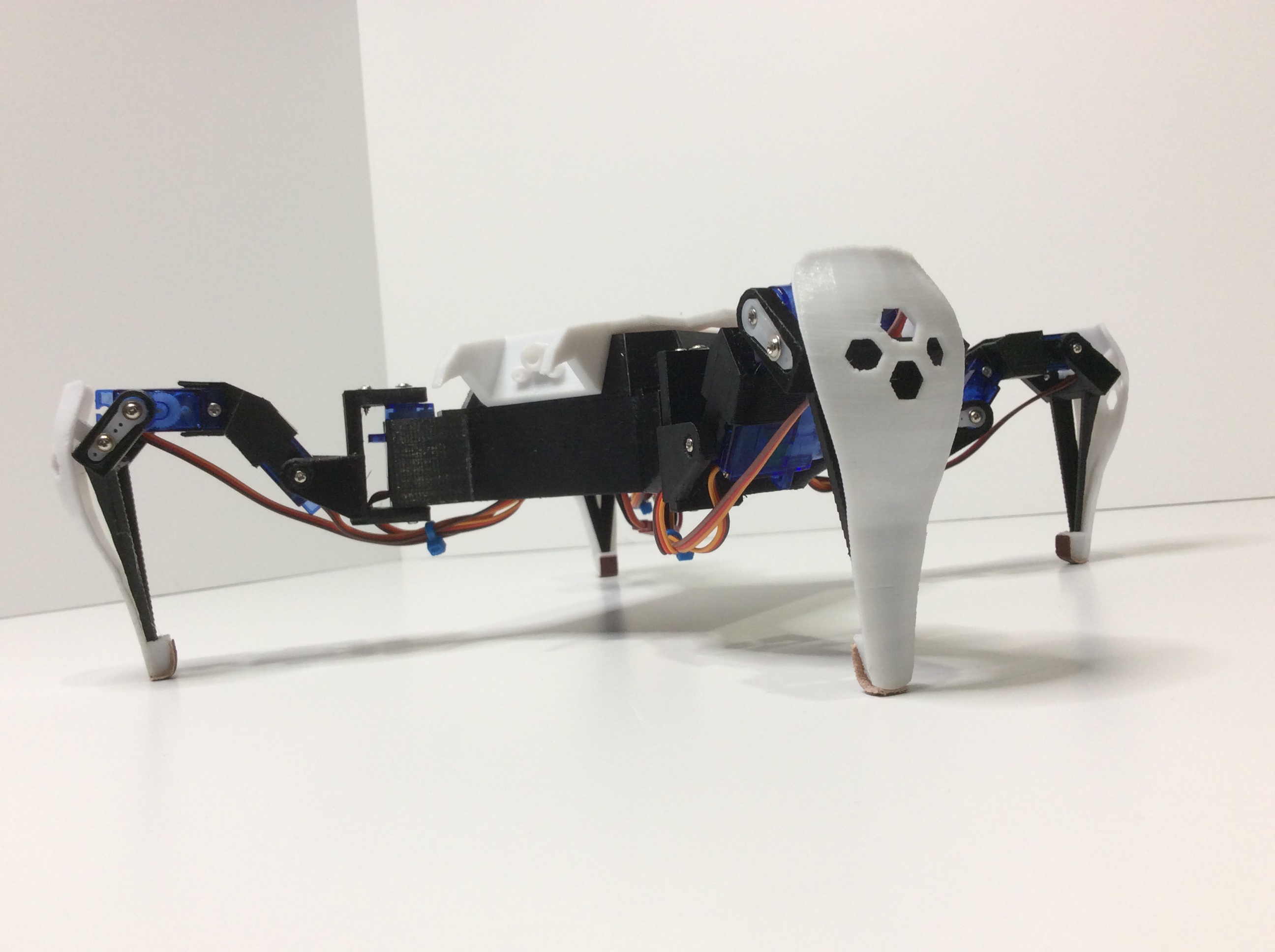
В нашем прошлом проекте робота на ROS мы рассматривали различные типы приводов для мобильных роботов, сравнивая их плюсы и минусы. Мобильные роботизированные платформы традиционно создают с колёсными приводами. Это обусловлено тем, что колёсное шасси относительно легко построить и запрограммировать его кинематику. Однако существуют и скелетные роботы, которые перемещаются на конечностях или ногах, имитируя естественное движение живых организмов. Скелет конечности должен обладать множеством степеней свободы.




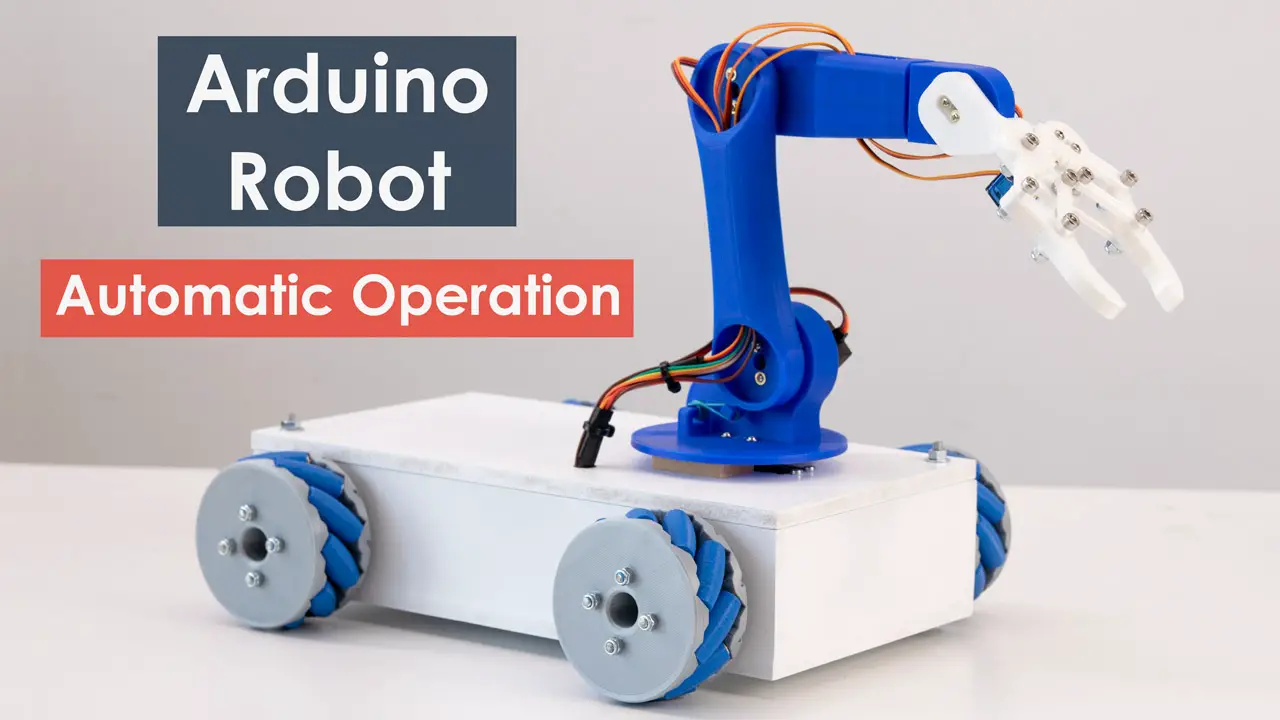



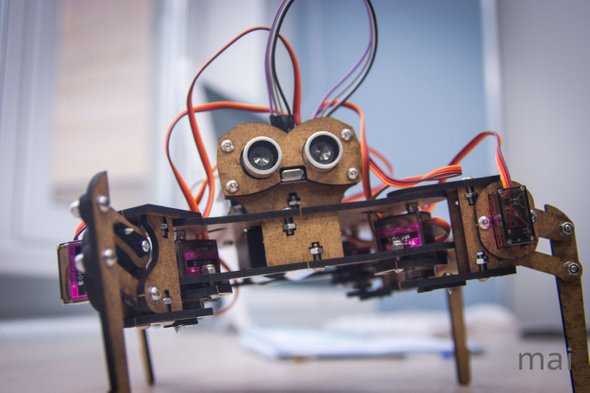
Большинство роботов, которых вы можете найти в продаже, либо изготовить сами - это колесные и гусеничные роботы. Так сложилось потому, что кинематика ходьбы для нас является задачей куда более сложной, чем механика езды на колесах: Но странно ведь получается. Сами то мы именно ходим!